OP
OP
jmccorm
Well-Known Member
- Thread starter
- #316
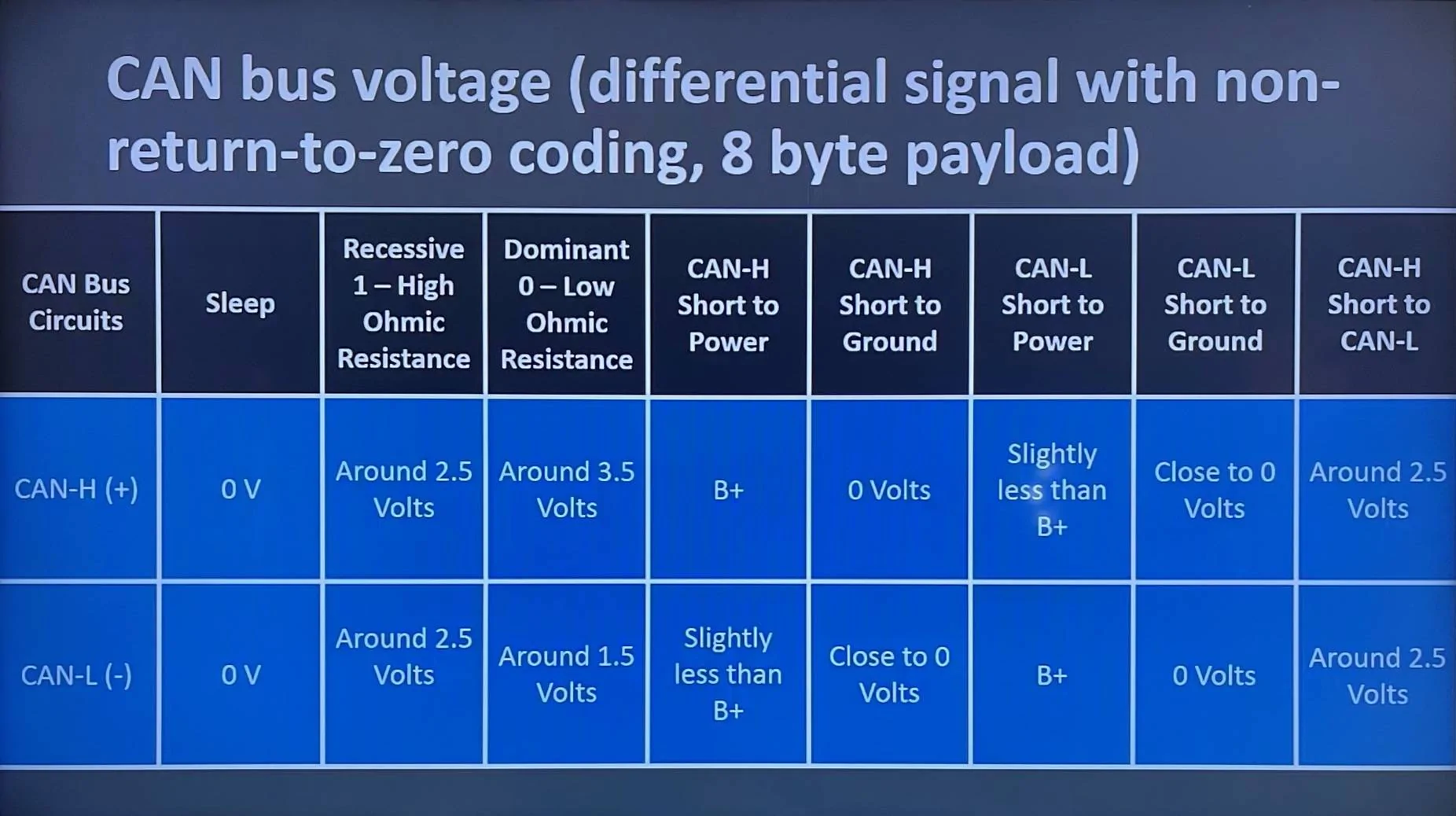
PowerNet Bus Voltages
I came across a table with the different voltages typically seen on the Wrangler's CAN bus and what they mean:

Based upon that, I was thinking...
As it stands now, there isn't a good way to have the Raspberry Pi shut itself down cleanly (because power is abruptly pulled from it) or spend additional time processing after the vehicle has been turned off because after it shuts down, it can't wake itself up when the vehicle restarts.
When the CAN+ line goes from 0V to 2V+, if we had a circuit that momentarily shorts a 3.3V reset line, we could have a device that wakes up the Raspberry Pi from it's shutdown state (via the RPi P6 header) whenever the vehicle wakes up.
Anyone know how to put together a circuit like that?
EDIT: I think it may be called a rising edge trigger momentary relay or even a (retriggerable) monostable multivibrator? Something like an SN74123 might be a good choice, but I wouldn't be able to design a circuit around it. (Lack of mad electronic skills.)
I came across a table with the different voltages typically seen on the Wrangler's CAN bus and what they mean:
Based upon that, I was thinking...
As it stands now, there isn't a good way to have the Raspberry Pi shut itself down cleanly (because power is abruptly pulled from it) or spend additional time processing after the vehicle has been turned off because after it shuts down, it can't wake itself up when the vehicle restarts.
When the CAN+ line goes from 0V to 2V+, if we had a circuit that momentarily shorts a 3.3V reset line, we could have a device that wakes up the Raspberry Pi from it's shutdown state (via the RPi P6 header) whenever the vehicle wakes up.
Anyone know how to put together a circuit like that?
EDIT: I think it may be called a rising edge trigger momentary relay or even a (retriggerable) monostable multivibrator? Something like an SN74123 might be a good choice, but I wouldn't be able to design a circuit around it. (Lack of mad electronic skills.)
Sponsored
Last edited:
")
