OP
OP
jmccorm
Well-Known Member
- Thread starter
- #406
I've gone ahead and made those changes for you. Thanks!This was a success! The data in 0x093 does show you using the manual gear selections. I just have to add 7'th and 8'th gear in.
It's good that we can distinguish between the vehicle being in 5th because the automatic transmission selected it versus being in 5th because the driver manually selected it. That's above and beyond it's use as a single place for both automatic and manual transmission gear selection. Nice!
About my own progress...
I'm still waiting for those shipments from pishop.us, but I've gone ahead and done some more work towards a final configuration including a RGB controller board that's far better constructed. I hope to get back to the world of CAN bus messages here in the next two or three weeks.
I've tested out that Zero2Go board, and sure enough, it does power detection and automatic on/off just fine as long as you don't manually shut down the OS. But there's a firmware fix for that which they're giving me instructions on how to implement.
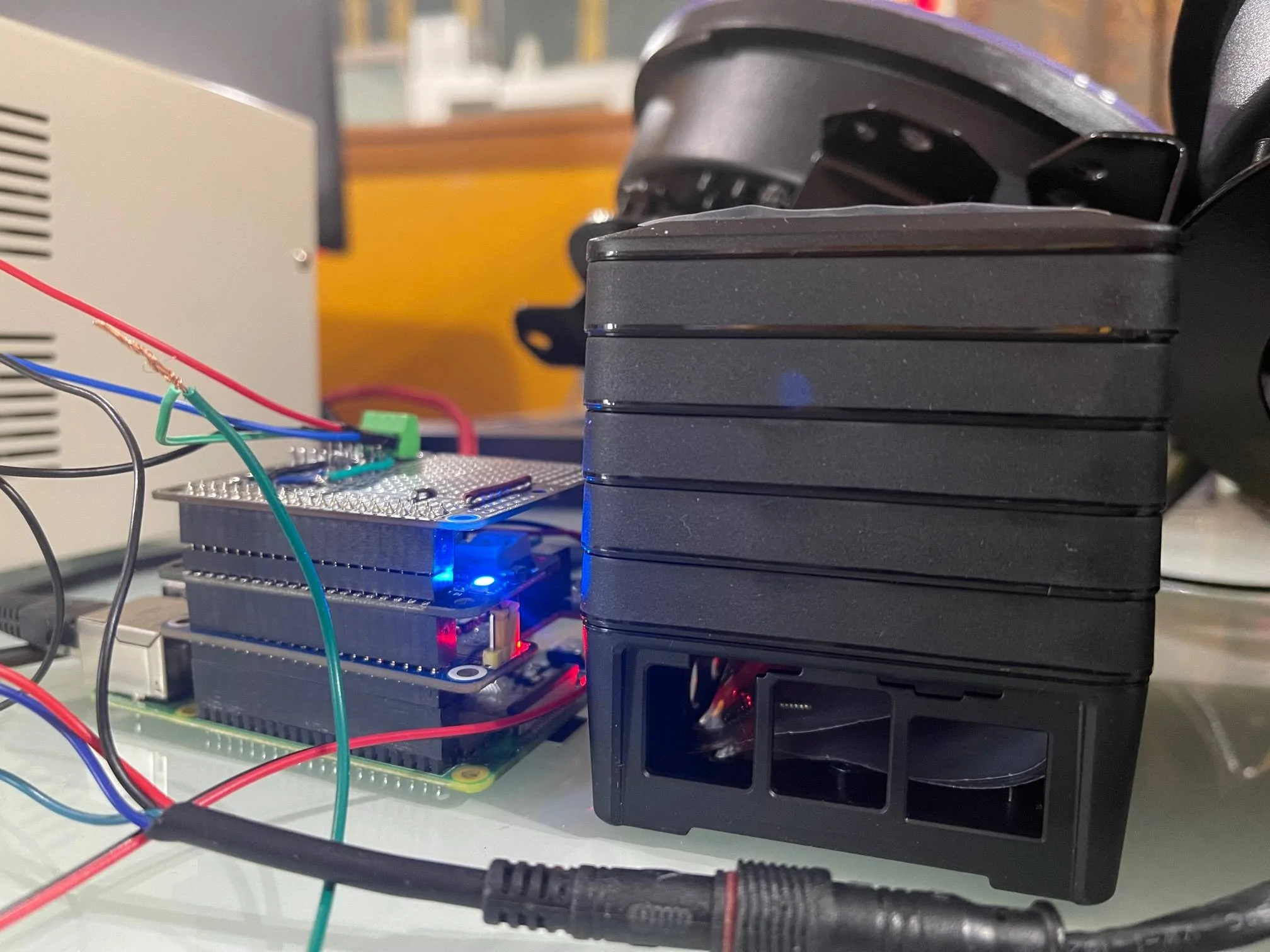
UPDATE: Here's the board stack as it stands now, still subject to change.
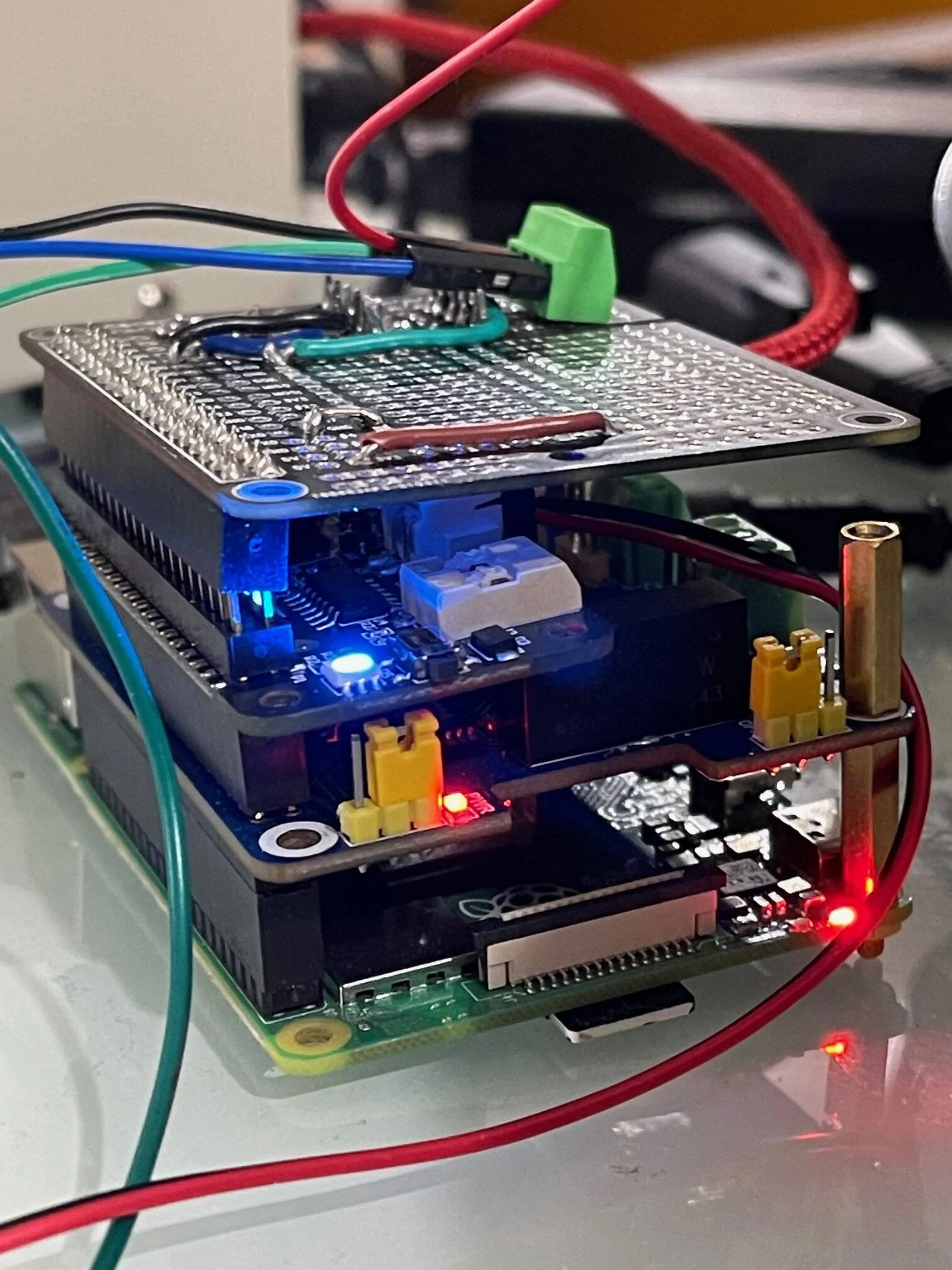
From bottom to top we have a Raspberry Pi 4B, Waveshare 2-Channel CAN Bus, Zero2Go power/sleep controller, and a custom RGB control board. USB-C and 6VDC power supply both go into the Zero2Go board, with nothing plugged into the Raspberry Pi's power input.
Sponsored